

le role de l’arduino dans la chaine de commande est de recevoir les instructions GCODE et de transformer les consignes de mouvements en impulsion électriques sur les sorties Step et Dir des axes correspondants. le module ARDUINO peut également, via les sorties correspondantes, commander la mise en rotation et l’arrêt de broche d’usinage ainsi que la mise en route et l’arrêt de l’arrosage de coupe . via un certain nombre d’entrées, il est egalement capable de gérer les limites d’axes , l’arret d’urgence , le demarrage cycle et la mise en arret sur coupure d’alimentation electrique.
pour gerer tout cela il faudra installer dans la memoire de l’arduino un programme appelé GRBL (voir vignette spécifique ).
ci dessous les brochages d’un ARDUINO UNO correspondant a toutes ces fonctions.
il y a 2 versions de branchement dépendant de la version de GRBL installée.
Version GRBL 0.9 et anterieures:
dans ces versions, la gestion de vitesse broche ou puissance laser n’etait pas implémentée ni le retour de sonde de position (Z probe).

Version GRBL 1.1 et Ultérieures:
depuis GRBL 1.1 , la gestion de vitesse broche ou puissance laser est implémentée dans GRBL ainsi que la gestion de la lubrification brouillard d’huile et la sonde de Z

Cablage POLOLU
avec 3 modules POLOLU A4988 pour les axes X , Y et Z , cela donne le schéma de cablage suivant:

et pour finir avec les 3 moteurs d’axes , l’alimentation des pololu et un condensateur de filtrage de 100 uF aux bornes de l’alimentation, cela donne:
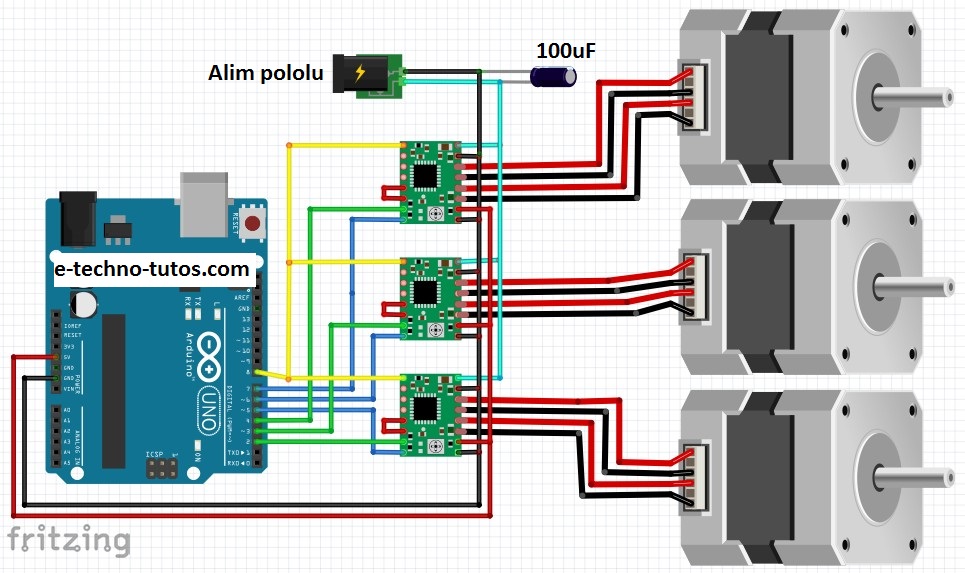
ATTENTION : l’ordre de branchement des fils de chaque moteur pas a pas sur son driver pololu dépendra des moteurs achetés et du sens de rotation de ceux ci aux premiers essais. en fonction des essais il vous faudra peut etre echanger les fils axe par axe. le schéma ci dessous donne de bons résultats dans la majorité des cas de NEMA 17 avec fils blanc/brun/orange/vert:
