l’utilisation de camera USB ou de PIcamera avec Open CV peut necessiter de regler les parametres video tels que taille d’image, debit d’image , luminosité, contraste, saturation, etc ..
voyons avec un petit programme python comment faire ce type de reglage .
le programme ci dessous permet de regler les parametres classiques : luminosite , contraste, saturation, teinte d’une petite camera USB 640×480 ou d’une PIcam.
import cv2
cap1=cv2.VideoCapture(1) #sortie 1 Webcam USB
USBcamwin="USBcam" # nom de la fenetre Webcam
while True:
ret, frame1 = cap1.read()
cap1.set(10,60) #luminosité
cap1.set(11,60) #contraste
cap1.set(12,60) #saturation
cap1.set(13,60) #teinte
cv2.imshow(USBcamwin, frame1)
key=cv2.waitKey(1)
if key & 0xFF == ord('q'):
cv2.destroyAllWindows
break
la liste des parametres complets est disponible ici : flags video
la structure du paramètre est la suivante: cap1. set ( n° flag , valeur )
on trouve la liste des valeurs de flag dans le lien au dessus , les plus courants sont les suivants:
10 = luminosité
11 = contraste
12 = saturation
13 = teinte
14 = gain
20 = finesse
22 = gamma
30 = ISO
pour la valeur du parametre , il n’y a malheureusement pas de regle, elle depends de la camera utilisée , par exemple pour une PIcam :
luminosité: de 0 a 100
contrast de -100 a 100
saturation de -100 a 100
en fonction de votre camera , il vous faudra donc faire soit une recherche sur le web soit tout simplement faire des essais .
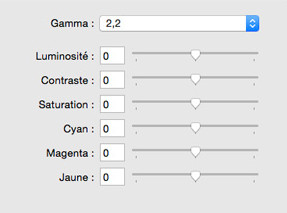
et comme souvent , vous pourrez par exemple associer les valeurs a des parametres pilotés par des sliders ou des widgets TKinter au travers d’une fenetre de menu comme dans la vignette de cette page.
la boucle « if + break » permet d’arrêter l’affichage de la vidéo en appuyant sur la touche « Echap » du clavier ( code ascii 27). voici le résultat de ce bout de programme:
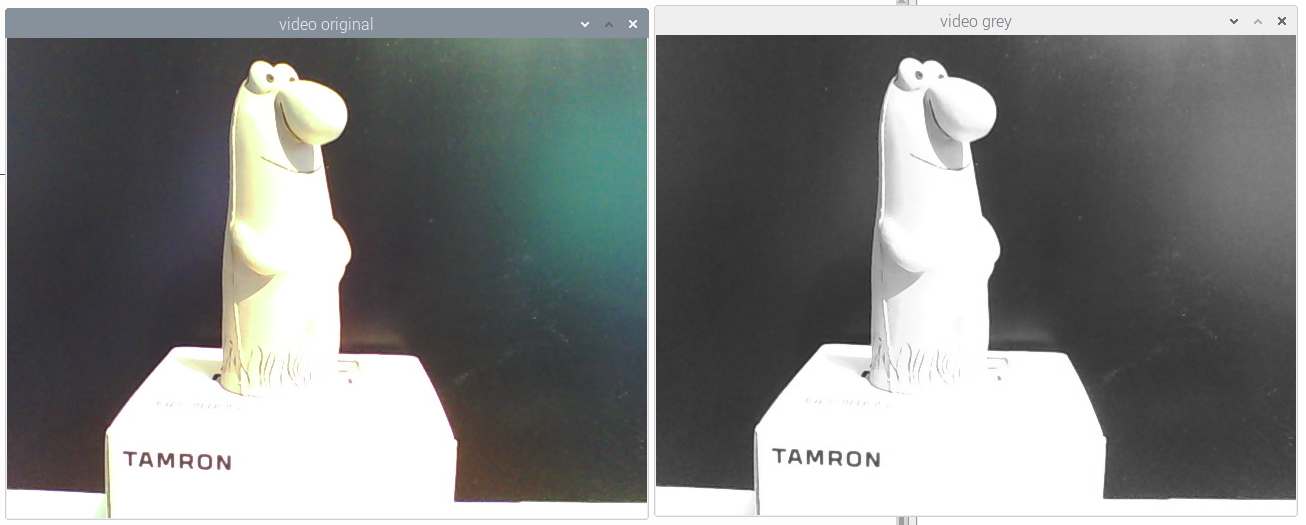
évolution du programme de base , on transforme le flux video RGB en nuance de gris et on affiche les 2 vidéos ensembles pour comparer le résultat:
import cv2
capture = cv2.VideoCapture(0)
while True:
# extraction des images
(ret, frame) = capture.read()
# conversion en nuance de grisgrayFrame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# affichage des 2 videos
cv2.imshow('video original', frame)
cv2.imshow('video grey', grayFrame)
# fin du programme par appui de la touche Echap
if cv2.waitKey(1) == 27:
break
capture.release()
cv2.destroyAllWindows()
voila ce que ça donne:
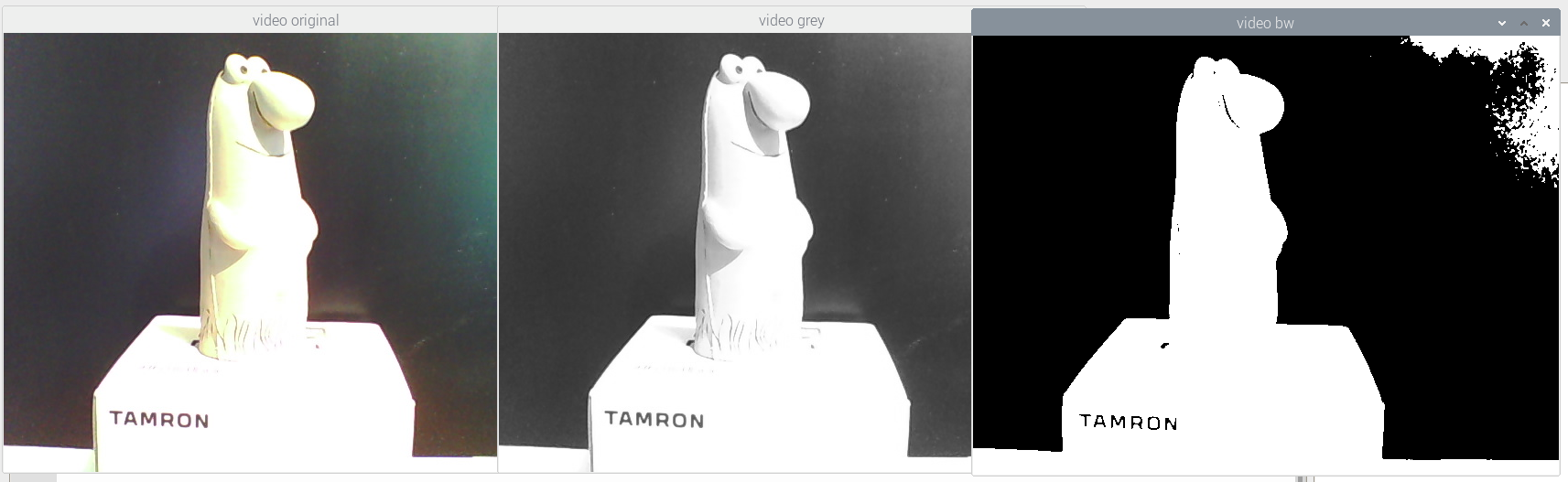
variante suivante du deuxième programme , on récupère le flux vidéo de la webcam USB , on le transforme en nuance de gris et en noir et blanc binaire et on affiche les 3 vidéos ensembles pour comparer le résultat:
import cv2
capture = cv2.VideoCapture(0)
while (True):
(ret, frame) = capture.read()
grayFrame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# conversion en noir et blanc
(thresh, blackAndWhiteFrame) = cv2.threshold(grayFrame, 127, 255, cv2.THRESH_BINARY)
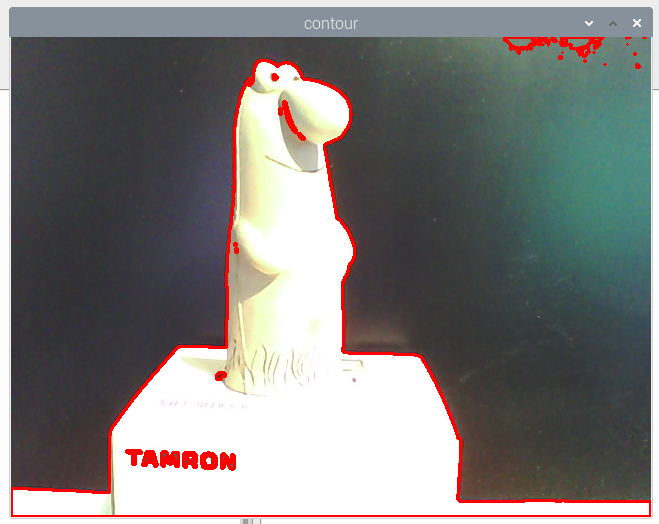
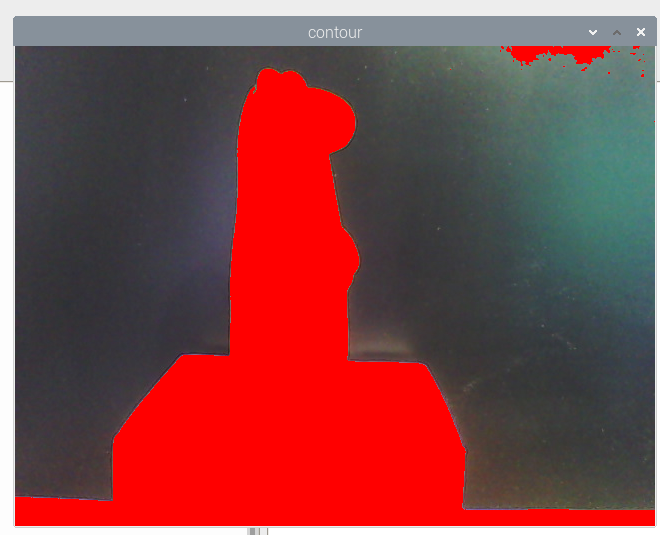
# recherche du controurcontours = cv2.findContours(blackAndWhiteFrame, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE) [-2]# dessin du contour en rougefor c in contours:
cv2.drawContours(frame, [c], -1, (0,0,255), 2)
cv2.imshow('contour', frame)
if cv2.waitKey(1) == 27:
break
capture.release()
cv2.destroyAllWindows()
copie d’ecran du resultat:
petite variante du traitement précédent , juste en remplaçant le 2 en fin de la ligne de commande « drawContour » par -2 on remplis le contour au lieu de dessiner le contour.
import cv2 #import de la librairie openCV
import numpy #import de la librairie numpy (maths sur les matrices d'ordre N)# les images sont traitées comme des matrices d'ordre 3 (X,Y,couleurRGB)
# x pixels en largeur + Y pixels en hauteur + 3 bits de couleurs (RGB)
# fonction qui defini les reactions aux evenements souris
def click_event(event,x,y,flags,param):
if event == cv2.EVENT_RBUTTONDOWN:
cv2.circle(img,(x,y),20,(0,255,0),3)
strXY = str(x) + ',' + str(y)
cv2.putText(img, strXY, (x+21,y), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255,255,0),1)
elif event == cv2.EVENT_LBUTTONDOWN:
cv2.rectangle(img,(x-20,y-20),(x+20,y+20),(255,0,0),3)
strXY = str(x) + ',' + str(y)
cv2.putText(img, strXY, (x+21,y), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255,255,0),1)
# creation d'un fond noir (img)dans une fenetre('image')et liaison de la fonction setmoussecallback
img = numpy.zeros((480,640,3), numpy.uint8)
cv2.namedWindow('image')
cv2.setMouseCallback('image',click_event)
while(1):
cv2.imshow('image',img)
if cv2.waitKey(1) == 27:
break
cv2.destroyAllWindows()
ce qui donne comme exemple de résultat un programme qui ouvre une fentre a fond noir et dessine un rectangle bleu ou un cercle vert a l’endroit de la souris suivant qu’on clique sur le bouton droit ou gauche de la souris. il affiche en plus a droite de la figure les coordonnées (X,Y ) de la position de souris dans l’image ( coordonnées en pixels).
prenons quelques instants pour détailler et comprendre ce qui se passes:
au milieu de lignes de codes on trouve les 3 lignes suivantes :
la première ligne défini une variable tableau « img » a partir de la librairie numpy qui met a zéro (numpy.zeros) les valeurs de la matrices d’ordre 3 définissant en fait une image de 480pixels de hauteur, par 640 pixels de largeur et 3 valeurs de couleurs BGR pour chaque pixel . les valeurs sont codées sur 8bits via le code ‘numpy.uint8’ . comme les valeur BGR sont mises a zéro par la fonction numpy, cela fait une image en noir
la deuxième ligne crée une fenêtre OpenCV dont le nom est ‘image’
la troisieme ligne affecte les évènements de la souris à la fenêtre ‘Image’ et a la fonction ‘clik_event’
faisant appel a une fonction ‘click_event’, il faut définir celle ci , c’est l’objet des lignes suivantes:
la premiere boucle if correspondant au bouton droit enfoncé , elle dessine un cercle dans la fenetre ‘img’ , dont le centre est aux coordonnées x,Y retournées par la souris , d’un rayon de 20 pixels, de la couleur BGR (0,255,0) soit le Vert (G). puis retourne une variable string ‘strXY’ constituée des coordonnées XY du pointeur de souris avec une virgule au milieu. et affiche le texte dans la fenetre’img’ constitué de la variable ‘strXY’ , affichée aux coordonnées (x+21,Y) en ulisant la police de caracteres arial taille 0.5 en couleur (255,255,0) soit un bleu clair et d’epaisseur 1 .
la deuxieme boucle If fait la meme chose si le bouton Gauche est enfoncé et dessine un rectangle bleu cantré sur la position de la souris de largeur et hauteur identique (20 pixels) de couleur bleu foncé et affiche a droite les coordonnées XY.
la derniere partie du programme :
while(1):
cv2.imshow('image',img)
if cv2.waitKey(1) == 27:
break
cv2.destroyAllWindows()
effectue une boucle permanente qui affiche l’image ‘img’ resultante de toutes les operations dans la fenetre ‘image’ puis teste l’appui de touche au clavier et termine le programme si ‘echap » est appuyée la dernier ligne de commande ferme la fenêtre du programme .
SimpleBlobDetector est un utilitaire d’OpenCV permettant la détection automatique des « Blobs ». en Anglais un Blob est une tache . cet utilitaire est donc intéressant pour la détection de formes basiques circulaires, elliptiques ou rectangulaire. il trouve son intérêt par exemple en astronomie pour la détection d’étoiles sur un ciel noir avec une camera.
pour illustrer , ses possibilités , commençons par un programme simple utilisant une camera USB et une feuille blanche avec quelques taches faites au marqueur noir.
import numpy as np
import cv2
cap = cv2.VideoCapture(0)
while (True):
ret, frame = cap.read()
# entrée des parametres de SimpleBlobDetector
params = cv2.SimpleBlobDetector_Params()
params.minThreshold = 10; # Change thresholds
params.maxThreshold = 300;
params.filterByColor = False # Filter by color.
params.BlobColor = 0 # 0 for darkcolor & 255 for light colors
params.filterByArea = True # Filter by Area.
params.minArea = 200
params.maxArea = 600
params.filterByCircularity = False # Filter by Circularity
params.minCircularity = 0.1
params.maxCircularity = 1
params.filterByConvexity = False # Filter by Convexity
params.minConvexity = 0.87
params.maxConvexity = 2
params.filterByInertia = False # Filter by Inertia
params.minInertiaRatio = 0.01
params.maxInertiaRatio = 0.1
# utilisation de SimpleBlobDetector
detector = cv2.SimpleBlobDetector_create(params)
keypoints = detector.detect(frame)
im_with_keypoints = cv2.drawKeypoints(frame, keypoints, np.array([]), (0,0,255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
cv2.imshow('frame', im_with_keypoints)
if cv2.waitKey(1) == 27:
break
voici le resultat avec les parametres saisis.
toutes les taches faites au feutre ne sont pas entourées , c’est tout simplement le resultat de la definition des lignes de filtre ci dessous qui fixent la taille mini et maxi des zone de pixels a choisir ( entre 200 et 600 pixels):
on active les differents type de filtre en mettant la valeur a » True » ( pour desactiver , il faut mettre « False« ) et en choisissant une valeur pour les 2 lignes de seuils mini et maxi.
pour illustrer la fonction de chaque filtre , ci dessous une petite image de synthese:
nous allons maintenant sur le meme principe , determiner les coordonnées d’une tache blanche sur une feuille sombre . voici le programme:
l’evolution majeure par rapport au premier programme , est l’activation du mode couleur et la prise en compte de couleurs lumineuses ( ici la tache blanche sur fond sombre) dans les 2 lignes en rouge. et l’ajout d’une boucle imprimant les coordonnées (en pixel de l’image) dans les 2 lignes bleues. si on fait tourner ce programme dans thonny python , et que l’on fait bouger l’image ou la camera voici 2 exemples du resultat ( a gauche les coordonnées qui s’affichent dans la fenêtre shell de thonny python):
nous avons ici les bases d’un programme python pour de l’autoguidage sur une monture équatoriale astronomique… ne reste qu’a transformer ces coordonnées « pixels » en deplacements AD/DEC au fur et a mesure du déplacement de l’étoile de référence dans l’image ….
la detection de mouvement est une option interressante par exemple dans le cas de video surveillance , ci dessous un programme basique qui fait le boulot.
NOTA: derriere les caractères # des ligne en bleu qui peuvent remplacer la ligne juste avant pour des tests au choix soit sur un fichier video soit sur le livestream d’une camera. et également soit en dessinant des rectangles autour des objets en mouvement soit en dessinant le contour de l’objet.
une copie d’ecran du resultat sur une video AVI et avec dessin de rectangles englobants sur les objets en mouvement:
examinons maintenant , une variante du programme précédent utilisant des fonction elaborées de OpenCV ainsi que le principe des masques , qui permet de n’appliquer la detection que sur la partie droite de la video
afficher l’image simultanée d’une PIcam et d’une webcam USB avec un bout de Python c’est possible , le programme est extrêmement simple:
copier le petit morceau de python ci dessous dans votre éditeur python et lancez le (votre PICAM doit etre raccordée a son slot et une webcam raccordée au RPI en USB), vous devriez voir 2 fenêtres s’ouvrir dans votre écran avec chacune la vidéo de la camera concernée a l’intérieur.
ce programme nécessite d’avoir installé au préalable la librairie python « OpenCV ».
NOTA1: les numéros de sorties a utiliser (ici sortie 0 et sortie 1 ) sont fonctionnels dans la majorité des cas. mais si vous rencontrez des problèmes , utiliser la commande shell « lsusb » pour déterminer quelles sorties du RPI sont utilisées.
NOTA2:il est possible d’ajouter d’autres webcam , pour cela il suffit d’implémenter autant de lignes dédié ( capx , ret, et cv2.imshow) que de flux video souhaité.
ce type d’utilisation en astro , permet par exemple d’utiliser une Webcam USB en autoguidage et la PIcam HQ en prise de vue pause longue ou en vidéo planetaire . une autre utilisation potentielle avec plusieurs Wab cam serait pour la video surveillance exterieure et interieure d’un observatoire en combinaison avec de la detection de mouvement et un envoi automatique de photo par mail …
AMELIORATION: voyons comment redimensionner et positionner les 2 fenêtres d’affichage
import cv2
cap0=cv2.VideoCapture(0) #sortie 0 Picam
Picamwin="PIcam" # nom de la fenetre PIcam
cv2.namedWindow(PIcamwin, cv2.WINDOW_NORMAL)
cv2.resizeWindow(PIcamwin, 600, 450)
cv2.moveWindow(PIcamwin, 420, 110)
cap1=cv2.VideoCapture(1) #sortie 1 Webcam USB
USBcamwin="USBcam" # nom de la fenetre Webcam
cv2.namedWindow(USBcamwin,cv2.WINDOW_NORMAL)
cv2.resizeWindow(USBcamwin, 400, 300)
cv2.moveWindow(USBcamwin, 10, 260)
while True:
ret, frame0 = cap0.read()
ret, frame1 = cap1.read()
cv2.imshow(PIcamwin", frame0)
cv2.imshow(USBcamwin, frame1)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
voici un exemple du resultat du pgme ci dessus avec une PIcam sur son slot et une Webcam USB sur port USB, l’ensemble affiché sur un petit ecran HDMI touschscreen 7″ 1024×600 pixels .chacune des video est affichée en taille de fenetre differente et positionnées en bas et dans la largeur de l’ecran , permettant l’acces au menu du bureau du RPI . l’affichage avec des fenetres Opencv permet en outre d’avoir la vue video via VNC en acces distant . ce qui n’est pas possible avec les fenetres live view de la librairie Picam.
tout le monde connait le prix d’un pole master, voyons ici comment faire le sien avec une webcam et un bout de python pour exploiter ça sur un raspberry PI.
Un polemaster est tout simplement une camera CCD commandée par un software qui affiche une mire d’alignement polaire comme par exemple la mire Skywatcher.
le principe est donc simple, il faut superposer une mire « graphique » sur la video d’une camera.
vous trouverez ci dessous un petit bout de programme Python qui affichera en temps réel la mire d’entête par dessus la vidéo d’une webcam.
pour la mise au point finale, il faudra faire des essai en fonction de la camera choisie , et de la focale de l’objectif monté dessus et ajuster les diametres et coordonnées des figures graphiques en fonction de vos besoins. l’idéal étant de se calibrer avec un viseur polaire optique type skywatcher . le principe fonctionne egalement avec une PIcam sur son slot , il suffit de changer le numéro de sortie ( en général 0 pour la PIcam) .
il faudra en préliminaire installer la librairie python computer Vision « OpenCV« . bien entendu , libre a vous de concevoir votre propre mire en utilisant les option d’openCV draw .
il est possible de commander et configurer un APN reflex moderne en remote via USB avec un Raspberry PI en utilisant la librairie GPHOTO2.cette option est très intéressante pour l’astro-photo, en particulier pour des time-laps en pauses longues. nous allons voir ici comment procéder.
avant de pouvoir utiliser Gphoto2 il va falloir faire l’installation des prérequis et de la librairie elle même . ci dessous les instructions qui sont disponible dans le fichier joint en PDF pour pour pouvoir faire des copier coller des lignes de commandes.
executer les commandes ci dessous pour installer gphoto2
cd ~/gphoto2
autoreconf --install --symlink
./configure
make
sudo make install
MISE A JOUR DE LA CONFIGURATION RPI
ajouter la lignes ci dessous dans le fichierde configuration : /etc/ld.so.conf.d/libc.conf
/usr/local/lib
rafraichir le cache avant de continuer:
sudo ldconfig
créer les regles udev pour l’APN
/usr/local/lib/libgphoto2/print-camera-list udev-rules version 201 group plugdev mode 0660 | sudo tee /etc/udev/rules.d/90-libgphoto2.rules
créer la base de données pour udev
/usr/local/lib/libgphoto2/print-camera-list hwdb | sudo tee /etc/udev/hwdb.d/20-gphoto.hwdb
UTILISATION DE GPHOTO2
gphoto2 est un « catalogue » de fonctions permettant d’envoyer des commandes a votre APN reflex via le port USB et avec des commandes shell sous linux . voici la liste des commandes:
nous allons en tester 2 pour cela connecter votre APN reflex a votre RPI via son cordon USB et executer la commande shell ci dessous pour verifier que votre Gphoto2 detecte bien votre APN:
gphoto2 –auto-detect
si le nom de votre Appareil photo apparait après l’exécution de la commande c’est que tout est OK et vous pouvez aller plus loin et exécuter le premier test en prenant une photo. pour cela exécuter la commande shell ci dessous:
gphoto2 –capture-image
UTILISATION DE GPHOTO2AVEC PYTHON
le travail en mode de commande shell n’est pas des plus convivial particulierement la nuit en nomade . nous allons voir ici comment utiliser Gphoto2 via un programme python. pour cela, il faut d’abord installer le module python permettant d’encapsuler Gphoto2 . exécuter la commande:
sudo pip install -v gphoto2
nous allons maintenant écrire un petit programme Python qui permet de prendre une photo et de l’enregistrer sur le raspberry
INTERFACE GRAPIQUE AVEC TKINTER : TIME LAPS PAUSE LONGUE
nous allons voir ici comment créer une interface graphique ergonomique avec Tkinter pour lancer des commandes au travers de menus . le programme ci dessous permet de faire une serie de photo en pause longue , il fonctionne avec un ecran tactile et affiche un cadre avec menu dans lequel on peut faire varier un certain nombre de paramètres de prise de vue.
NOTA: il a ete optimisé pour un CANON EOS M50.
les paramètres sont :
durée de pause pour chaque photo => reglage par slider de 0 a 180 secondes
intervalle entre chaque photo=> reglage par slider de 0 a 100 secondes
nombre de photo=> reglage par slider de 0 a 100 photos
en haut a droite sensibliité ISO=> reglage par choix dans liste de valeur
un bouton bleu en bas a gauche de lancement de séquence de prise de vue , une fois le cycle lancé , un message affiche le statu d’avancement en bas de l’ecran entre les 2 boutons
un bouton rouge en bas a gauche pour quitter le programme
programme en fichier txt
a copier coller dans votre editeur python ou a enregistrer directement avec l’extension « .py »
petit tuto pour expliquer comment faire un ensemble roue et vis sans fin avec les moyens du bord classique a savoir : de la vis pas metrique pour le vis sans fin , un rond dans le materiau choisi et un taraud correspondant au diametre et au pas de la vis metrique et un tour pour usiner les dentures de la roue.
attention, cette technique est a reserver pour les materiaux tendres ( plastique , alu , laiton).
aucune garantie de resultat probant sur l’acier …
le principe est simple: le taraud monté dans le mandrin va servir de fraise de taillage , la piece elle est montée sur un axe fixé sur le chariot transversal et laissée libre de tourner mais sans jeu . ensuite on fait « rentrer » la roue dans le taraud et c’est le profil du taraud qui va entrainer la roue en rotation et generer la denture sur la roue . on augmente doucement la prise de passe a chaque tour complet ( faire un repaire sur la roue pour pouvoir visualiser un tour complet. le taraud doit tourner a vitesse lente .
pour ceux qui voudraient faire autrement que du pas mmetrique , on peut faire avec des tarauds pas anglais ou eventuellement fabriquer l’equivalent d’un taraud au pas et au profil voulu .
petite video youtube de la manip sur une roue en teflon ( systeme pour motoriser une petite monture equatoriale astro):
élément primordiale pour la fonderie artisanale a la maison le sable . 2 solutions s’offrent a vous : l’achat en ligne ou aller jusqu’au bout dans le Do It Yourself et le faire vous même .
pour l’achat , voici 2 liens de site pro en ligne ou s’en procurer :
pour la version DIY, ci dessous petite vide youtube qui explique la recette . les produits de base sont du sable; le plus fin possible ( sable de maçonnerie, de rivière ou d’aquariophilie), de l’eau , et de la Bentonite en poudre fine. on trouve de la bentonite en achat en ligne , par exemple ici: https://www.mon-droguiste.com